 Download Tutorial Lengkap (PDF 2,690 KB)
Download Tutorial Lengkap (PDF 2,690 KB)


 Mungkin anda pernah atau sering menerbangkan TS40 TRAINER. Tidak ada salahnya mencoba tantangan yang satu ini, yaitu membuat dan memprogram TS40 TRAINER agar dapat terbang sendiri dengan arah penerbangan yang telah kita tentukan.
Mungkin anda pernah atau sering menerbangkan TS40 TRAINER. Tidak ada salahnya mencoba tantangan yang satu ini, yaitu membuat dan memprogram TS40 TRAINER agar dapat terbang sendiri dengan arah penerbangan yang telah kita tentukan.
Hal ini dapat dimungkinkan dengan TS40 TRAINER yang dilengkapi dan dikendalikan menggunakan ArduPilot APM 2.5. ArduPilot adalah perangkat kontroler robotika Open Source yang cukup banyak dikenal. APM 2.5 banyak digunakan untuk robotika permukaan (mobil, tank dll), juga pesawat dan helikopter (quadcopter, hexacopter dll).
Inti dari ArduPilot adalah APM Board. Dengan Processor, Memori dan Port IO, APM Board dapat diset secara khusus untuk mengontrol robot darat, pesawat atau copters menggunakan firmware tertentu yang diupload ke APM Board. Dilengkapi dengan GPS Module (eksternal) dan modul kompas onboard, 
sebenarnya APM Board telah memiliki semua parameter yang diperlukan / sensor untuk mengetahui status dari pesawat yaitu lokasi (koordinat), X, Y, Z sumbu tatus s dan kecepatan pesawat, maka ArduPilot dapat mengirimkan perintah ke motor servo. Dengan demikian kita dapat memanfaatkan keunggulan AutoPilot APM 2.5 yaitu terbang dengan Stabilized Mode dan Preprogrammed WayPoint.
Initialize APM Board
Pertama kali kita harus menginitialize APM Board (yang baru kita beli) agar sesuai dengan pesawat kita. Untuk itu lakukan langkah langkah berikut:
1. Download ArduPilot Mision Planner dan APM Board Port USB driver yang sesuai (misalnya Arduino Mega 2560 dll).
2. Connect APM Board ke komputer dengan kabel USB dan install drivernya
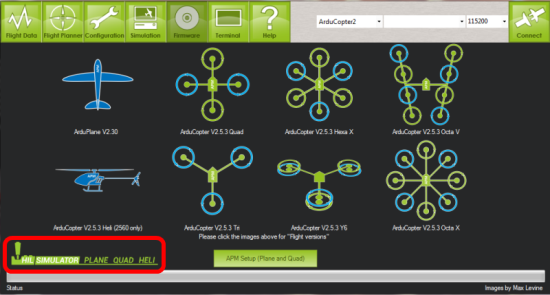 3. Jalankan ArduPilot Mission Planner dan pilih port terhubung ke APM Bord dan klik Connect
3. Jalankan ArduPilot Mission Planner dan pilih port terhubung ke APM Bord dan klik Connect
4.di Mission Planner, Pilih menu Firmware. Pilih perangkat yaitu ArduPlane dan tombol Setup APM untuk meng-upload Firmware.
Installing APM Board
Setelah AMP Board diinitialize atau nantinya juga di preprogram, selanjutnya kita dapat memasang APM Board di pesawat yang kita inginkan. 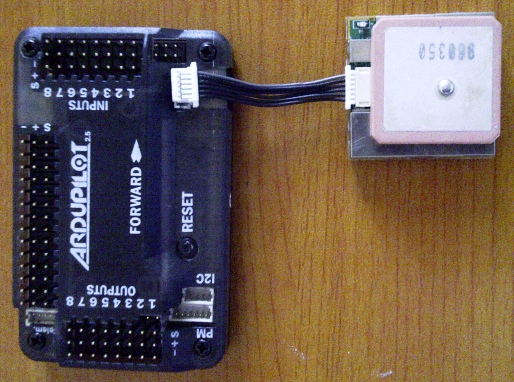 Mengingat APM Board dilengkapi dengan kompas internal, maka kita harus menginstal dengan benar, yaitu:
Mengingat APM Board dilengkapi dengan kompas internal, maka kita harus menginstal dengan benar, yaitu:
1. Anak Panah dan Konektor GPS harus menghadap ke depan, dan kabel servo ke belakang.
2. Board juga harus menghadap ke atas, dengan perisai IMU di atas.
3. Usahakan Board terpasang dengan kuat, tidak bergerak atau bergeser.
Connecting APM Board
Setelah APM Dewan terpasang dengan baik dan kuat di pesawat , sekarang saatnya untuk menghubungkannya ke radio penerima, servo dan lain-lain. Untuk menghubungkan APM Board untuk RC Receiver, kita perlu :
1. Setidaknya RC dengan 5 - channel. 7 channel atau lebih sangat dianjurkan.
 2. Kabel female-female - untuk untuk setiap saluran yang akan kita gunakan.
2. Kabel female-female - untuk untuk setiap saluran yang akan kita gunakan.
3. Sebuah sumber daya . Untuk pesawat listrik , ini biasanya ESC . Untuk gas / nitro pesawat bertenaga , servos kita akan perlu baterai / BEC sendiri.
4. Jika menggunakan APM 2.5, kami sarankan menggunakan (dan aksesorisnya, seperti
GPS dan radio 3DR), Power Modul yang tersedia. Kita masih akan memerlukan ESC terhubung ke output 3 kaki atau dipasang BEC ke cadangan pin output untuk daya servo.
Untuk menghubungkan APM Board, lakukan hal berikut:
1. Hubungkan Input bagian dari APM Board yang sesuai untuk RC Receiver
2. Hubungkan output APM Board untuk servo yang sesuai
3. Hubungkan Modul GPS dan tempatkan modul GPS sehingga bagian atasnya menghadapi langit.
 4. Hubungkan Baterai ke slot yang tersedia (Untuk daya servo)
4. Hubungkan Baterai ke slot yang tersedia (Untuk daya servo)
5. Hubungkan radio telemetri ( jika ada) ke APM Board
Bersambung
Download Tutorial Lengkap (PDF 2,690 KB)
















